ka")

kaiyun")
体育游戏app平台东谈主-场景交互建模这一新兴盘考所在-开云(中国)kaiyun网页版登录入口

文 | 极智GeeTech体育游戏app平台
空间智能是东谈主工智能领略、生成、推理并与三维全邦交互的本事,这种本事是东谈主类和动物智能的中枢,历经5.4亿年的进化才得以完善,而讲话的进化仅用了不到百万年。
空间智能之是以致关垂危,是因为它不仅是感知全国的花样,更是与物理环境互动的基础。不管是机器东谈主、智能赞成驾驶、杜撰本质的千里浸式体验,如故内容创作的翻新,空间智能王人是不能或缺的基石。
被誉为“AI教母”的李飞飞断言:“莫得空间智能,通用东谈主工智能(AGI)将无法终了。”
回想以前一年,Scaling Law驱动的新范式驱动告别参数规模珍视,多模态AI生成本事久了多个爆款应用,翻开了全新的竞速空间。
从李飞飞的ImageNet到最近腾讯发布并开源混元3D全国模子、高德上线寰球首个舆图AI原生智能体、蘑菇车联发布首个深度领略物理全国大模子MogoMind,从2D图片到3D模子,再到真什物理全国,一切王人在标明,空间智能当作AI与本质全邦交互的要津技艺之一,其爆发临界点正在到来。
空间智能为若何此垂危?空间智能的中枢有策画——不仅要让AI大概“看见”全国,还要让它大概领略三维空间,并在其中进行互动和学习,这是从单纯的视觉识别到着实领略、操作本质全国的跨越。
如今,咱们正站在数字全国的访佛调动点上,空间智能可能成为股东AI破裂面前本事戒指的要津。正如视觉本事催生了生物智能,空间智能将引颈AI插足一个全新的发展阶段。
在2025全国机器东谈主大会上,中国工程院院士倪光南指出,AI与空间智能的和会,是面前落实国度“东谈主工智能+”行动的要津中枢技艺,它正在重构三维物理全国,拓展大模子通向物理全国的桥梁。
他在演讲中强调,视觉是智能的首先。倪光南援用数据指出,一个4岁小孩通过视觉在四年中学到的视频信息量,与一个典型大讲话模子学习的互联网沿路公开文本信息量相配,这阐述要让AI着实坚忍和领略全国,仅靠文本信息是远远不够的,必须心疼视觉信息。
与讲话模子相比,空间智能的复杂性令东谈主叹为不雅止。讲话是线性的、一维的,而三维全国充满了动态性和物理规矩。从二维图像重建三维结构是一个数学上的“病态”问题,意味着可能存在多种解法,这使得空间智能的开发远比讲话处理复杂。
此外,讲话数据在互联网上随地可见,而空间数据大多存在于咱们的感知中,难以顺利获取。这种数据稀缺性为AI盘考带来了宏大挑战。
总体上,空间智能贫苦被归纳为四大中枢挑战。
最初,是维度复杂性。讲话是一维序列,而本质全国是三维空间与一维期间的结合。这种维度的指数级增长导致组合复杂性呈爆炸式高涨,使得空间智能的策动需求远超讲话模子。
其次,信息获取的非适定性。不管是生物眼睛如故机器录像头,王人是将三维全国“投影”到二维平面。这种数学上的“降维打击”,使得从2D图像重建3D信息成为一个病态问题。东谈主类通过双眼视差、畅通视差等多重脚迹贬责这一问题,但机器需要模拟访佛的多模态感知本事。
第三,生成与重建的二元性。讲话模子主要处理是生成任务,如文本生成;而空间智能系统必须同期具备“生成”杜撰全国和“重建”真什物理全国的本事。这种二元性要求模子在生成时死守物理规矩,在重建时捕捉细节,这对算法想象提议了极高要求。
第四,数据的稀缺性。互联网上存在海量的讲话数据,但适用于空间智能试验的结构化三维数据却极为稀缺,“真实数据+合成数据”的搀杂战略不错与探索如何诈欺东谈主类大脑中的先验知识来弥补数据缺口。
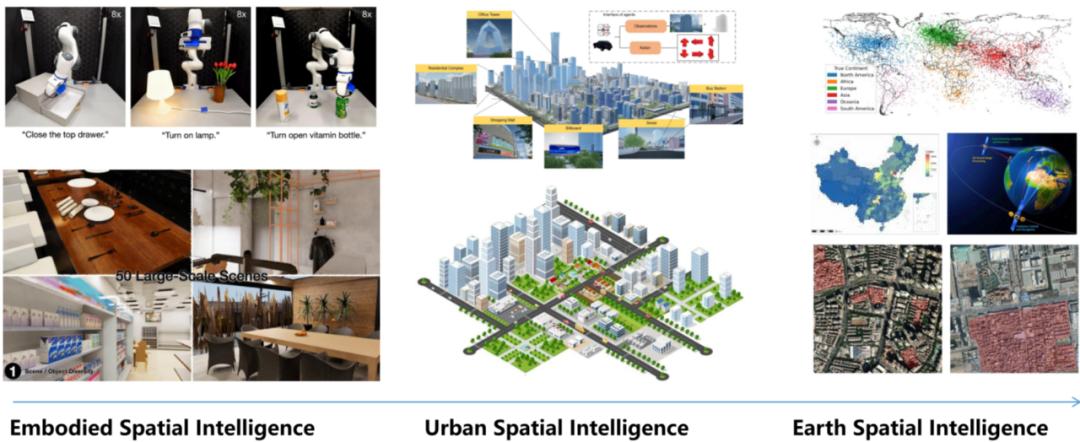
通往四维全国的五大档次空间智能重建是策动机视觉界限的中枢挑战,其有策画在于从视觉数据中还原三维空间的动态演化经由。这一技艺通过整合静态场景结构与时空动态变化,构建出具有期间维度的空间表征系统,在杜撰本质、数字孪生和智能交互等界限展现出要津价值。
这种多维度的空间建摹本事正成为新一代东谈主工智能发展的基础顺序——不管是构建具身智能的环境领路体系,如故试验具备物理学问的全国模子,高保果然4D空间表征王人明白着基石作用。
值得瞩见解是,前沿盘考正从单纯的几何重建转向对场景物理属性和交互逻辑的建模,这种转变使得空间智能不仅能呈现视觉真实的动态场景,更能相沿智能体与杜撰环境的拟真交互。
在构建空间智能经由中,不错分手为五个递进的档次:
第一层(Level 1):底层三维属性的重建(如深度、位姿、点云图等)。三维场景领略的基石在于对底层视觉脚迹的精确复原,这一层级聚焦于四大中枢成分:深度感知、相机定位、点云构建与动态追踪,这些基础组件共同组成了三维空间的数字化骨架。
第二层(Level 2):三维场景组成成分的重建(如物体、东谈主体、建筑、场景等)。在完成底层3D脚迹索要后,这一层的盘考要点转向场景中具体对象的紧密化建模,包括东谈主物、各种物体以及建筑结构等元素的几何重建。天然现存顺序大概处理这些元素的空间分散问题,但对它们之间的动态交互关系仍穷乏有用建模。
值得关爱的是,跟着神经发射场、3D高斯点云霄示以及可变形网格等创新技艺的破裂性进展,盘考者们也曾大概终了具有高度真实感的细节还原和合座结构保持。这些技艺特地不仅权臣升迁了重建质料,更为影视殊效制作、杜撰本质等应用场景提供了要津的技艺相沿。
第三层(Level 3):完好意思的4D动态场景的重建。这一层盘考费事于破裂静态场景的戒指,通过引入期间维度构建动态4D表征系统,为千里浸式视觉体验提供技艺相沿。从应用场景来看,相关盘考主要聚焦两大所在:面向通用场景的4D重建技艺,以及针对东谈主体畅通的专项动态建模顺序。这种技艺分野反应了不同应用场景对时空建模的互异化需求。
第四层(Level 4):包含场景里面组成部分之间交互关系的重建。这一层代表了空间智能盘考的垂危破裂,其中枢在于培育场景元素间的动态交互模子。当作交互行径的主导者,东谈主体天然成为盘考的要点对象,早期使命创始性地终明晰从视频中索要东谈主体与物体的畅通关联。成绩于三维表征技艺的翻新,新一代算法在交互物体的几何外不雅和畅通轨迹重建方面取得了权臣升迁。
特地值得瞩见解是,东谈主-场景交互建模这一新兴盘考所在,通过解构东谈主与环境的复杂互动机制,为构建具有物理合感性的数字全国奠定了垂危基础。
第五层(Level 5):引入物理规矩以及相关敛迹要求的重建。Level 4系统在交互建模方面取得垂危破裂,但仍面对物理真实性的要津挑战。现存顺序巨额未能整合基础物理规矩(如重力、摩擦等),导致其在机器东谈主动作师法或赞成驾驶等任务中存在彰着局限。
Level 5的破裂性进展主要体面前东谈主体畅通仿真和场景物理建模,结合仿真平台与深度强化学习,将盘考界限彭胀至物体形变、碰撞检测等复杂物理景观,终明晰从视频到物理合理动作的摇荡。
这个层级化的技艺框架,展现了AI领路本事从基础到高阶的完好意思进化旅途——就像教一个孩子先学会不雅察(Level 1),再坚忍物体(Level 2),接着领略畅通(Level 3),然后掌持互动(Level 4),最终领略物理规矩(Level 5)。这种循序渐进的破裂,正在股东杜撰全国从“看起来真实”向“动起来真实”的质变。
空间智能开启无穷想想象力从技艺演进角度看,空间智能代表了东谈主工智能界限的一种新鲜想维花样。它通过将感知信息调动为对于外部环境的概括模子,使得智能体大概有用展望和领略周围全国的动态变化。
以自动驾驶为例,空间智能不仅不错匡助赞成智驾系统字据历史训戒展望其他车辆和行东谈主的行径,还能在特定情况下提前养息行车战略,极大提高行驶安全性与效果。这种基于物理轨则和学问的数字全国生成本事,是以往任何东谈主工智能技艺王人无法相比的。
空间智能不错被视为东谈主工智能从“自觉感知”走向“自主领路”的迈进,其让东谈主工智能技艺驱动破裂信息空间的局限,向真实全国的三维空间彭胀,进一步升迁了东谈主工智能在内容环境中的适当本事。
它不仅是东谈主工智能技艺的再次进化,更是东谈主工智能系统朝着着实领略和交互咱们所生存的三维全国迈出的要津一步。正如讲话智能让东谈主工智能大概领略和生成东谈主类讲话一样,空间智能将使东谈主工智能大概领略和操作物理全国。
相较于传统的图像识别技艺,空间智能要求东谈主工智能具备三维空间的领略与及时行径养息本事。通过对动态场景的分析与决策,东谈主工智能不仅大概识别物体,还大概领略它们之间的相对位置和畅通轨迹。
比如,在复杂的城市交通环境中,赞成驾驶系统必须诈欺空间智能来展望交通流动,同期确保大概有用应酬突发的交通情况。此种双重本事的结合,让自动驾驶的安全性和可靠性将发生质的飞跃。
空间智能不仅拓宽了东谈主工智能的应用场景,也股东了算法的进一步发展。异日,空间智能将为智能体提供更高级次的领路与推理本事,使其大概在模拟的杜撰环境中进行反复实验,从而优化决策在本质全国中的应用。
如斯,科学家和工程师们不错在无风险的要求下,测试和转换智能算法的进展。这种在杜撰环境中的试验,为本质中的应用提供了愈加保障的保障,对于股东技艺的熟练具有垂危兴致。
在日本,空间智能已全面铺开。比如日本正在把所有这个词东京进行3D数字孪生化,这是终了AI空间智能的要津一步。这一数字孪生模子的规模至极大,并且它对东京的描画也至极之紧密,其充足位置精度大要在10cm以内,不仅包含了LiDAR点云,还有翔实的CityGML和及时交通数据。字据日本的预期,到2030年将终了一个完好意思的数字孪生城市,从交通到动力作念到信息无缝和会,越来越多的城市房屋、工场将摇荡为模拟数据。
对于城市进行的数字孪生其实也便是基于感知的城市数据,在收罗空间上像“孪生”一样再现建筑物、谈路等基础顺序与经济行为、东谈主流等各类成分。也便是说,不错通过基于从物理空间各个界限的行为中获取的及时数据,在收罗空间中进行高级分析和模拟,并将其收尾以交互式的局势高速反馈到物理空间。
正如英伟达高级盘考科学家Jim Fan所言,异日的城市不断将依赖于及时图形引擎中的模拟和集群系统,这将使得机器东谈主和自动化开荒大概快速适当复杂的环境。机器东谈主将不会孤就地进行试验,它们大概在及时图形引擎中进行模拟,并通过一个宏大的集群进行彭胀,以生成下一个数万亿级别的高质料试验数据。
通过在高精度模拟环境中试验,机器东谈主能赢得丰富的试验数据,并在复杂场景中快速学习。这种顺序将股东机器东谈主从杜撰全国到本质全国的告成移动,升迁其在内容应用中的效果和智能。
与传统的城市模拟相比,数字孪生大概提供及时反馈,并跟着城市的动态变化而养息其状态,这使得城市不断变得愈加机动和高效。
举例,在新南威尔士州,通过数字孪生和东谈主工智能结合的技艺,交通不断不错及时养息以减少拥挤,从而最猛进度地提高社会效益。
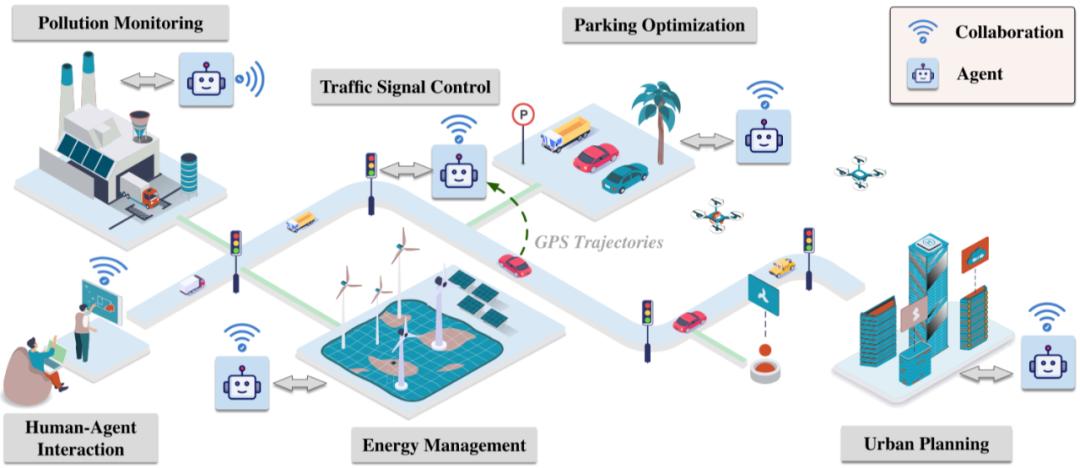
在中国,物理全国AI大模子MogoMind通过通感算一体化开荒整合车辆轨迹、交通流量等异构数据,依托交通数据流及时全局感知、物理信息及时领路领略、通行本事及时推理策动、最优旅途及时自主策画、交通环境及时数字孪生,以及谈路风险及时预警请示六大要津本事,不仅大概识别路面情状、交通艳丽、封锁物的物理状态,还能将复杂的交通环境信息摇荡为可领略、可引申的智能决策建议,为交通不断部门和出行者提供应酬决策。股东城市交通从“单点智能”走向“全局智能”。
在医疗界限,空间智能技艺不错对医学影像数据进行三维重建和分析,匡助大夫更准确地会诊疾病。举例,对CT、MRI等影像数据进行三维重建,不错更清楚地夸耀东谈主体器官和病变的位置、局势和大小,为大夫提供更准确的会诊信息。同期,空间智能技艺还不错为大夫提供手术导航和赞成决策,通过对患者的体魄结构进行三维建模和分析,大夫不错更好地了出恭术部位的剖解结构和血管分散,提妙手术的准确性和安全性。
五亿年前体育游戏app平台,视觉的出现颠覆了黝黑的全国,激励了最深刻的动物进化模式。以前十年,东谈主工智能的特地相似令东谈主叹惜。当咱们驱动为策动机和机器东谈主赋予空间智能,就像大天然开启了生物各类化期间,东谈主工智能的异日将由此更具无穷想象力。
